
Sommaire
Rappel sur les technologies d’assistance physique
Il existe deux familles de technologies d’assistance physique :
- Les robots et dispositifs d’assistance physique sans contention (DAPsc) : tels que des bras motorisés reliés au sol ou aux murs qui ne sont pas portés par l’utilisateur et ne sont pas en contact direct avec le corps.
- Les robots et dispositifs d’assistance physique avec contention (DAPac) : tels que les exosquelettes qui sont portés par l’utilisateur et donc en contact direct avec le corps.
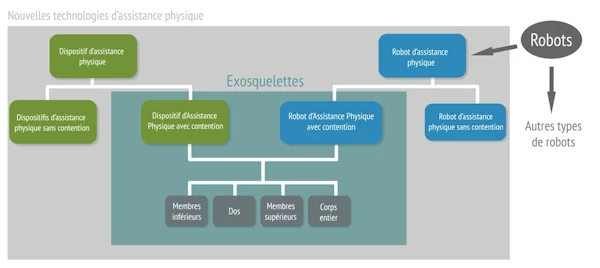
Schéma de classification des dispositifs d’assistance physique :
Exosquelette, DAPac/sc, RAPac/sc – Source INRS
Présentation rapide de la norme X35-800
« NF X35-800 – Ergonomie – Méthode d’intégration des dispositifs et robots d’assistance physique à contention de type exosquelette – Expression des besoins, sélection, conception, évaluation et déploiement »
La nouvelle norme volontaire NF X35-800 qui vient d’être publiée au mois d’août 2023 est le fruit du travail de la commission de normalisation ergonomie AFNOR X35A.
Son objectif est d’accompagner la démarche de prévention par la définition d’une méthode d’intégration des dispositifs DAPac/RAPac communément désignés par le terme « exosquelettes », comprenant l’expression des besoins, la sélection, la conception, l’évaluation et le déploiement dans un organisme :
- Expression du besoin : Analyser l’activité existante ou projetée
- Sélection : Définir les critères de choix en fonction de l’activité et facteurs organisationnels et humains FOH
- Conception : Intégrer les exigences ergonomiques relatives à l’activité dans une approche itérative
- Evaluation / Validation : Mise en œuvre en situation d’utilisation (réelle et/ou représentative) par l’opérateur
- Déploiement : Préparer l’équipement des postes concernés
Page de garde Norme AFNOR NF X35-800 – Source AFNOR
Domaines d’application et principes généraux de la norme X35-800
Une approche basée sur l’interaction entre l’utilisateur et l’exosquelette
La norme X35-9800 fournit des recommandations ergonomiques centrées sur l’interaction entre les dispositifs et robots d’assistance physique à contention (DAPac et RAPac) et les opérateurs qui en sont équipés pour:
- L’évaluation de l’usage de DAPac et RAPac existants;
- La conception de nouveaux DAPac et RAPac ;
- La mise en place / intégration de tels dispositifs (opportunité et faisabilité).
La norme se centre sur l’interaction entre l’utilisateur et l’exosquelette [Dispositif et Robot d’Assistance Physique à contention (DAPac / RAPac)] dont il est équipé dans la situation de travail identifiée comme nécessitant une assistance physique. Elle concerne tous les secteurs d’activité et s’adresse à tous les organismes utilisateurs, ainsi qu’aux organismes concepteurs, fabricants et intégrateurs.
Ce que la norme ne couvre pas :
- La définition des caractéristiques techniques des DAPac et RAPac.
- Les dispositifs médicaux, de rééducation, de jeux, de sport et de loisirs.
Principes généraux de la norme X35-800
- Objectif : Réduire les sollicitations biomécaniques pour prévenir les risques de Troubles Musculosquelettiques ou TMS)
- Prévention : Respect des 9 principes généraux de prévention (article L4121-2 du code du travail)
- Vocation : Les apports normatifs visent à maintenir voire augmenter l’efficience de l’activité de l’opérateur ≠ augmenter la capacité physique.
- A contrario : il n’a pas vocation à décrire des méthodes visant à mesurer les performances opérationnelles / industrielles atteintes par les opérateurs équipés de RAPac et DAPac.
- Cibles visées : Tous les opérateurs, dont ceux à capacité ou aptitude restreinte ainsi que les opérateurs vieillissants.
- Mise en place :
- Analyse de la situation et de l’environnement de travail
- Accompagnement (information, formation, et entraînement) et suivi
Sommaire de la norme X35-800
- 1 – Domaine d’application
- 2 – Références normatives
- 3 – Termes et définitions
- 4 – Présentation de la méthode d’intégration
- 5 – Expression des besoins
- 6 – Sélection des DAPac/RAPac
- 7 – Conception
- 8 – Évaluation
- 9 – Déploiement dans l’organisme
- Annexe A (informative) Exemple de grille pour l’expression des besoins
- Annexe B (informative) Tableaux pour l’évaluation
- Annexe C (informative) Exemple d’application : Évaluation d’un dispositif d’assistance physique du dos (DAPac)
- Bibliographie
Ressources
AFNOR
INRS
- Atain-Kouadio, J. J., & Sghaier, A. (2017). Les robots et dispositifs d’assistance physique : Etat des lieux et enjeux pour la prévention (Note Scientifique et Technique NS 354). INRS. https://bit.ly/37asaEC
- Atain-Kouadio, J.-J., Kerangueven, L., & Turpin-Legendre, E. (2018). Acquisition et intégration d’un exosquelette en entreprise (Guide pour les préventeurs ED 6315). INRS. https://bit.ly/3FUixas
- Atain-Kouadio, J.-J., Wioland, L., Theurel, J., & Delacourt, A. (2017). Intégrer un exosquelette : Retour d’expérience et points de repères. Innovation technologique, changements organisationnels : quels enjeux pour la prévention ?, Nancy. https://bit.ly/3FWe3QF
- INRS. (2018a). Exosquelette au travail : 6 points de vigilances [PDF]. https://bit.ly/300EwMD
- INRS. (2018b). Exosquelettes au travail : Comment s’y préparer ? [Vidéo]. https://bit.ly/3rJXy5d
- INRS. (2018c). Exosquelettes. Ce qu’il faut retenir—Risques [Dossier Web]. INRS. https://bit.ly/3Gpnp7R
- INRS. (2019a). Exosquelettes au travail—Publications et outils. INRS. https://bit.ly/3zeJ3ub
- INRS. (2019b). Rendez-vous de Travail & Sécurité—Les exosquelettes [Vidéo]. https://bit.ly/3GgKQiq
- INRS. (2019c). Exosquelettes au travail : Étudier leur impact sur la santé des salariés [Vidéo]. https://bit.ly/3Gkg7RG
- INRS : ressources et études sur les technologies d’assistances physique.
- Theurel, J., & Claudon, L. (2018). Exosquelettes au travail : Impact sur la santé et la sécurité des opérateurs état des connaissances (Brochure ED 6311; Etat des connaissances). INRS. https://bit.ly/37ZDuV8
- Theurel, J., & Desbrosses, K. (2018). Usage d’un exosquelette d’assistance des bras : Bénéfices et contraintes lors de tâches de manutention—NT62. Hygiène et Sécurité au Travail, 251. https://bit.ly/3v15FdN
- Wioland, L., Debay, L., & Atain-Kouadio, J. J. (2019a). Acceptation des exosquelettes par les opérateurs : Étude exploratoire—TF264. Références en Santé au Travail, 157, 45‑61. https://bit.ly/3wDXc0
- Wioland, L., Debay, L., & Atain-Kouadio, J. J. (2019b). Processus d’acceptabilité et d’acceptation des exosquelettes : Évaluation par questionnaire – TF274. Références en Santé au Travail, 160, 49‑76. https://bit.ly/3LzPESt
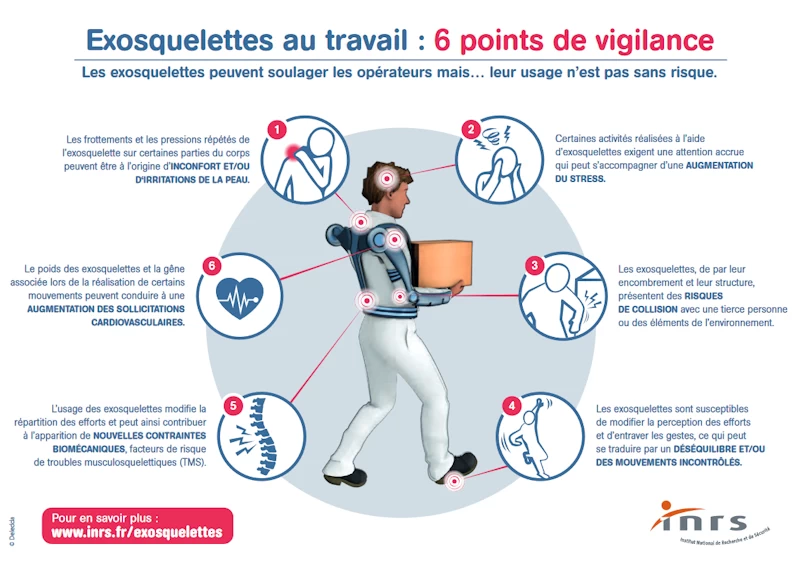
Exosquelettes au travail : 6 points de vigilance – infographie INRS
Etudes sur les exosquelettes (quelques)
- Ali, A., Fontanari, V., Schmoelz, W., & Agrawal, S. K. (2021). Systematic Review of Back-Support Exoskeletons and Soft Robotic Suits. Frontiers in Bioengineering and Biotechnology, 9, 765257. https://doi.org/10.3389/fbioe.2021.765257
- Jarrassé, N., Sarthou-Lajus, N., & Damour, F. (2018). La robotique et le mythe de « l’homme augmenté ». Études, Février(2), 31‑42. Cairn.info. https://doi.org/10.3917/etu.4246.0031
- Kazerooni, H., Tung, W., & Pillai, M. (2019). Evaluation of Trunk-Supporting Exoskeleton. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 63(1), 1080‑1083. https://doi.org/10.1177/1071181319631261
- Madinei, S., Alemi, M. M., Kim, S., Srinivasan, D., & Nussbaum, M. A. (2020). Biomechanical Evaluation of Passive Back-Support Exoskeletons in a Precision Manual Assembly Task : “Expected” Effects on Trunk Muscle Activity, Perceived Exertion, and Task Performance. Human Factors: The Journal of the Human Factors and Ergonomics Society, 62(3), 441‑457. https://doi.org/10.1177/0018720819890966
- Maurice, P., Čamernik, J., Gorjan, D., Schirrmeister, B., Bornmann, J., Tagliapietra, L., Latella, C., Pucci, D., Fritzsche, L., Ivaldi, S., & Babič, J. (2019). Evaluation of PAEXO, a novel passive exoskeleton for overhead work. Computer Methods in Biomechanics and Biomedical Engineering, 22(sup1), S448‑S450. https://doi.org/10.1080/10255842.2020.1714977
- Maurice, P., Camernik, J., Gorjan, D., Schirrmeister, B., Bornmann, J., Tagliapietra, L., Latella, C., Pucci, D., Fritzsche, L., Ivaldi, S., & Babic, J. (2020). Objective and Subjective Effects of a Passive Exoskeleton on Overhead Work. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 28(1), 152‑164. https://doi.org/10.1109/TNSRE.2019.2945368
- Pillai, M. V., Van Engelhoven, L., & Kazerooni, H. (2020). Evaluation of a Lower Leg Support Exoskeleton on Floor and Below Hip Height Panel Work. Human Factors: The Journal of the Human Factors and Ergonomics Society, 62(3), 489‑500. https://doi.org/10.1177/0018720820907752
- Poon, N., van Engelhoven, L., Kazerooni, H., & Harris, C. (2019). Evaluation of a Trunk Supporting Exoskeleton for reducing Muscle Fatigue. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 63(1), 980‑983. https://doi.org/10.1177/1071181319631491
- Sylla, N., Bonnet, V., Colledani, F., & Fraisse, P. (2014). Ergonomic contribution of ABLE exoskeleton in automotive industry. International Journal of Industrial Ergonomics, 44(4), 475‑481. https://doi.org/10.1016/j.ergon.2014.03.008
- Theurel, J., Desbrosses, K., Roux, T., & Savescu, A. (2018). Physiological consequences of using an upper limb exoskeleton during manual handling tasks. Applied Ergonomics, 67, 211‑217. https://doi.org/10.1016/j.apergo.2017.10.008
- Van Engelhoven, L., Poon, N., Kazerooni, H., Rempel, D., Barr, A., & Harris-Adamson, C. (2019). Experimental Evaluation of a Shoulder-Support Exoskeleton for Overhead Work : Influences of Peak Torque Amplitude, Task, and Tool Mass. IISE Transactions on Occupational Ergonomics and Human Factors, 7(3‑4), 250‑263. https://doi.org/10.1080/24725838.2019.1637799
- Voilque, A., Masood, J., Fauroux, Jc., Sabourin, L., & Guezet, O. (2019). Industrial Exoskeleton Technology : Classification, Structural Analysis, and Structural Complexity Indicator. 2019 Wearable Robotics Association Conference (WearRAcon), 13‑20. https://doi.org/10.1109/WEARRACON.2019.8719395
A lire aussi sur FrugAgile
Repères
- Sécurité des robots collaboratifs : conception et déploiement
- Démarche ergonomique & robots collaboratifs – Partie 1 : Contexte
- Démarche ergonomique & Robots collaboratifs – Partie 2 : conduite de projet centrée sur l’activité
Blog
- Thématiques robot robotique robotisation / cobot cobotique / exosquelette
Crédit photo : Ottobock
