
Si trois hommes se réunissent, ils ont l’intelligence de Monju Bosatsu [Dieu de la sagesse] » Proverbe japonais
Sommaire
Enjeux de santé et de sécurité au travail liés aux mutations technologiques
L’industrie du futur modifie profondément les systèmes de production et les organisations du travail par l’utilisation croissante des technologies de production avancées, la généralisation des technologies numériques au niveau des postes de travail et l’accroissement de la flexibilité des systèmes de production. Ces mutations ne peuvent pas être sans conséquence, en matière de santé et de sécurité au travail (Marsot et coll., 2021).
C’est dans ce contexte que ce situe le rôle de la démarche ergonomique : celui de permettre à toutes les parties prenantes (direction, managers, opérateurs, IRP, chefs de projets, concepteurs, intégrateurs …) de mieux comprendre et agir sur les processus décisionnels et la conduite du changement vers « l’usine du futur » centrée sur l’activité.
La robotique collaborative est-elle un « remède » aux Troubles-Musculo-Squelettiques (TMS) ?
Le sujet de la robotique collaborative appelle à la vigilance
Une attitude ambiguë vis-à-vis des robots
Une recherche paneuropéenne conduite par (Gnambs & Appel, 2019) a montré que les attitudes favorables envers les systèmes robotiques autonomes, y compris les robots assistant les travailleurs, ont diminué sur une période de cinq ans. De nombreuses études suggèrent que l’interaction avec un cobot pourrait être une source de stress, de réactions cognitives-émotionnelles négatives ou de tension mentale pour leurs opérateurs humains (INRS, 2020 ; Jocelyn, 2022 ; Paluch et coll., 2022 ; Pollak et coll., 2020).
Le risque d’une adoption hâtive sans analyse systémique.
Le nombre de cobots mis en œuvre dans l’environnement industriel a considérablement augmenté. Comme le notent (Pollak et coll., 2020) l’introduction de dispositifs automatiques autonomes est motivée par le désir de rendre le travail moins exigeant et plus sûr pour les opérateurs. Comme le montrent (Atain Kouadio et coll., 2015 ; Barcellini, 2020 ; Héry & Levert, 2017 ; INRS, 2020, 2021) les robots collaboratifs sont, dans le contexte de l’Usine du Futur, l’illustration de la perspective de la technologie pensée comme un « remède » aux atteintes à la santé des opérateurs.
En effet, l’argument majeur utilisé dans la promotion de cette technologie serait leur capacité à prévenir l’apparition de Troubles-Musculo-Squelettiques (TMS) liés au travail, sans que soient réellement questionnées de manière systémique « leurs causes » et la pertinence de la seule réponse technologique. (Barcellini, 2020).
L’importance de la distribution du contrôle
Bien que la collaboration entre les cobots et leurs opérateurs ait été couronnée de succès dans de nombreux domaines, (Pollak et coll., 2020) nous mettent en garde sur le défi qu’elle pose en termes de distribution du contrôle. En effet, si ce dernier n’est pas géré de manière appropriée, cela peut avoir de graves conséquences individuelles (problèmes de santé liés au stress, par exemple) et organisationnelles (telles que de l’absentéisme ou un comportement contre-productif envers les robots).
L’introduction des robots collaboratifs pose un large éventail de questions du point de vue de l’analyse ergonomique du travail
- Quelles seront les attitudes des opérateurs à l’égard des robots / cobots ? Comment seront prise en compte l’acceptabilité et l’expérience subjective des travailleurs âgés et jeunes ? (Paluch et coll., 2022 , Rossato et coll., 2021)
- Les possibilités de situations de travail seront-elles plus soutenables ou au contraire réduite à du « travail appauvri » (Zouinar, 2018) ?
- Quels seront les modes de coopérations possibles entre humains et robots ? Comment seront organisées les répartitions de tâches ? Il y-aura-t-il autonomie ou subordination des opérateurs aux robots ? (Barcellini, 2020 ; Pollak et coll., 2020);
- De nouvelles tâches seront-elles à réaliser par les opérateurs à la suite de leur introduction ? Comment seront-elles prises en compte dans le prescrit ? Quelles marges de manœuvre seront laissées pour les accomplir ? Quelles formations suivront les opérateurs pour avoir la capacité de les réaliser dans de bonnes conditions (santé et sécurité vs performance) ?
- Comment seront anticipées et organisées les transformations organisationnelles qui en découlent ? y compris en termes d’emploi : GPEC, suppression de postes, acquisition des compétences nécessaires (formation professionnelle continue, recrutement interne ou externe ?), reconnaissance des nouvelles compétences et évolution de poste (statut, salariale) … ?
La technologie ne porte pas à elle seule une potentialité de prévention.
La préservation de la santé au travail est multifactorielle
Les modèles d’étiologie des troubles musculosquelettiques (TMS) montrent que la réduction des contraintes biomécaniques n’est qu’une condition nécessaire et non suffisante à la prévention des TMS (Aptel et coll., 2011 ; Bourgeois & Hubault, 2005 ; Saint-Vincent et coll., 2010 ; Vézina, 2021).
La préservation de la santé au travail ne repose pas uniquement sur la « qualité » de conception de la technologie mais aussi sur des éléments indispensables liés aux facteurs organisationnels et humains (Barcellini, 2020) tels que :
- les dimensions psychosociales, (Cf voir le lien entre TMS et RPS)
- les possibilités offertes aux opérateurs de disposer de marges de manœuvre individuelles et collectives (régulation, coopération) pour prendre en compte les variabilités,
- l’usage effectif qui sera fait de la technologie : implantation, organisation du travail, fonctionnalités mise en œuvre, répartition des rôles homme-robot, modalités d’interaction…,
- les modalités de conduite du changement et de transformation du travail : implication effective des opérateurs et des IRP,
- les conséquences organisationnelles sur les processus de production, sur la transformation des tâches des opérateurs (yc la possibilité d’effectuer la maintenance de premier niveau) …
Les écueils des conduites de projets de conception à surmonter
Les principaux écueils à surmonter cités dans les travaux (Barcellini et coll., 2013, 2019 ; Daniellou, 1988; Hubault, 2010; Martin, 2012) sur les facteurs d’échec en conduite de projets de conception (voir aussi les échecs dans les projets numériques ou architecturaux) sont les suivants :
- Les logiques techniques ou économiques qui prévalent dans les décisions de transformations du travail. (Van Belleghem, Bahuaud & Martin, 2008)
- Les questions d’emploi, d’organisation, de conditions et de qualité du travail, de santé, de formation des opérateurs … sont traitées comme des conséquences des choix techniques ou économiques et ne sont pas (ou insuffisamment) intégrées en amont des processus décisionnels.
- La méconnaissance du travail (réel) et de l’importance des régulations, et l’absence de prise en compte des conséquences des choix de conception sur les marges de manœuvre, les possibilités d’agir des travailleurs, les régulations individuelles et collectives, les possibilités offertes de coopérations informelles …
- Un déficit de management de projet notamment par les décideurs (implication, leadership, parrainage du projet) ou de la maîtrise d’ouvrage (compétence, disponibilité, capacité décisionnelle) …
- Un déficit d’organisation des négociations nécessaires à l’avancée du projet (communication et compréhension entre la maîtrise d’ouvrage et la maîtrise d’œuvre, implication des services utilisateurs) mais également dans les processus de décisions liés aux transformations du travail (information partielle et implication tardive des utilisateurs et des IRP).
Le rôle de l’ergonomie : mieux comprendre et agir sur les processus décisionnels et la conduite du changement vers « l’usine du futur »
Contribution de la démarche ergonomique à la transformation du travail
L’ergonomie de l’activité considère que la transformation du travail est un processus collaboratif de conception d’outils matériels et immatériels (logiciels), de règles d’organisation du travail, d’espaces professionnels et sociaux, qui sont propres à une situation de travail.
Pour être efficace et pour permettre de penser réellement « le travail du futur », la conduite du changement doit donc répondre à ces exigences, ce qui implique (Barcellini, 2019 ; Barcellini et coll., 2019) pour que la collaboration soit effective :
- De s’inscrire dans le cadre d’un dispositif de conception pour et dans l’usage (Folcher, 2015) basé sur le dialogue entre trois pôles (Maîtrise d’usage MUS, Maîtrise d’Ouvrage MOA, Maîtrise d’œuvre MOE) dont les contributions vont s’articuler et s’enrichir réciproquement tout au long du projet :
- MUS : celles qui sont relatives aux usages et aux activités,
- MOA : celles qui tiennent à la volonté portée dans le projet,
- MOE : celles qui traitent des contraintes et des moyens de faisabilité.
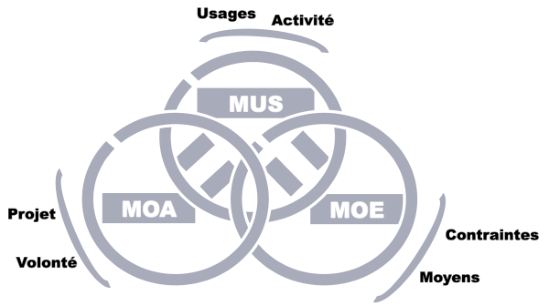
Interrelations et dialogue des trois pôles de contribution MUS, MOA, MOE (Folcher, 2015) pour concevoir pour et dans l’usage
- D’organiser des espaces de négociation entre les parties prenantes du projet (décideurs, management, production, maintenance, concepteurs, opérateurs concernés …) représentatives des trois pôles (MUS, MOA, MOE) pour débattre et prendre en compte dans le projet les diverses logiques en jeu : économique, organisationnelle, RH, santé, sécurité, qualité, production, d’activités de travail …
- De donner à voir « le réel » du travail pour que ce dernier soit pris en compte dans les objectifs des projets et les choix de conception, au même titre que les logiques techniques ou économiques.
- De soutenir la projection et la conception collaborative des futures situations de travail, à travers des méthodes telles que la simulation ergonomique du travail. (Barcellini et coll., 2013 ; Van Belleghem, 2018)
Conduire la transformation du travail comme une activité collaborative de conception et de prise de décision
Les démarches de conception portées par l’ergonomie de l’activité ont pour objectif de pallier aux écueils listés précédemment et d’organiser la conduite de transformation du travail comme une activité collaborative de conception et de prise de décision.
Passer d’un projet conduit par la technique à une conduite de projet centrée sur le travail actuel et futur (Van Belleghem, Bahuaud & Martin, 2008).
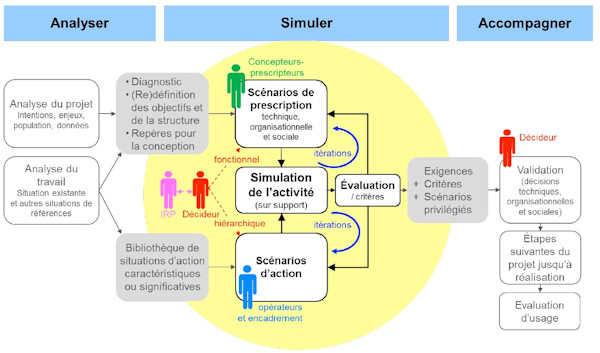
Schéma de la démarche de conduite de projet proposée par l’ergonomie de l’activité (Barcellini et coll., 2011, 2013)
La démarche ergonomique proposée vise justement à :
- Contribuer à la conception collective d’un système de travail de « qualité » impliquant les trois pôles (MUS, MOE, MOA). (Folcher, 2015)
- Eclairer les décisions de conception par des arbitrages entre les différentes dimensions de la performance (humaine, technique, économique…), leur articulation et les enjeux de santé. (Barcellini et coll., 2013)
- Enrichir les objectifs mêmes du projet par
- La connaissance du travail réel par les concepteurs (MOE) et les décideurs (MOA)
- La conception de scenarii de travail futur possible et la réalisation de simulations impliquant les opérateurs/utilisateurs (MUS) dans des groupes de travail pour faire émerger les possibilités de développement de nouveaux gestes professionnels, nouvelles compétences, gain en autonomie et les dimensions collectives et organisationnelles du travail yc futur.
- Les hypothèses d’implantation potentielle du cobot et de choix de mise en œuvre de caractéristiques fonctionnelles ; tout en anticipant les capacités à faire évoluer conjointement les équipements (par ajout de fonctions non anticipées), le travail futur des opérateurs et la mise à jour des compétences nécessaires.
Contribuer à porter une vision éthique du « travail du futur »
Comme le met en exergue (Barcellini, 2020) l’ergonomie a pour projet de mieux comprendre et à agir sur les processus décisionnels et de conduite du changement mis en œuvre par les dirigeants de PME en transition technologique et organisationnelle dans le cadre de projets liés à l’« Industrie du Futur ».
Elle contribue à porter une vision éthique et politique de ce que pourrait être un « travail du futur » synonyme d’un travail :
- Soutenable tout au long d’une vie professionnelle (Volkoff & Gaudart, 2015), prenant en compte les relations entre le travail, la santé, et l’expérience et combinant les caractéristiques suivantes :
- Exempt de contraintes ou de nuisances susceptibles de provoquer, à terme, des pathologies durables, voire irréversibles.
- S’adaptant à la grande diversité des individus (sexe, âge, caractéristiques physiques), à leur parcours de vie et de santé professionnelle (TMS, RPS, vieillissement …) ou à leur engagement comme travailleurs aidants.
- Offrant par l’organisation du travail et les systèmes d’emploi des marges de liberté compatibles avec les exigences de qualité : en termes de contraintes temporelles, d’adaptation des gestes, de modes opératoires et de possibilités offertes de coopération.
- Porteur d’une vision constructive de l’individu et de sa santé ;
- S’appuyant sur des organisations « capacitantes » et effectivement collaboratives (Falzon, 2008, 2013) qui créent les conditions d’un travail performant et en santé (Caroly, 2010 ; Falzon, 2013) quel que soit l’âge des opérateurs (Volkoff & Gaudart, 2015).
Ressources
Articles de recherche
- Acoulon, S. (2013). Les robots collaboratifs – Guide d’intégration de la santé et de la sécurité. CETIM.
- Acoulon, S. (2014). Les robots collaboratifs – Guide d’intégration de la santé et de la sécurité. (Réédition). Centre technique des industries mécaniques (CETIM). https://bit.ly/3J2IB3h
- Aptel, M., Cail, F., & Aublet-Cuvelier, A. (2011). Les troubles musculosquelettiques du membre supérieur (TMS-MS) (Guide pour les préventeurs ED 957). INRS. https://bit.ly/3cydNt5
- Barcellini, F. (2019). Industrie du futur : Quelle place pour le travail et ses transformations ? In E. Bourdu, M. Lallement, P. Veltz, & T. Weil (Éds.), Le travail en mouvement (p. 136‑147). Presses des Mines. https://hal.archives-ouvertes.fr/hal-02433598/document
- Barcellini, F. (2020). Quelles conceptions de la coopération humains‑robots collaboratifs ? : Une expérience de participation au projet de conception d’un démonstrateur de robotique collaborative. Activites, 17‑1. https://doi.org/10.4000/activites.5007
- Barcellini, F., Buchmann, W., & Lafeuillade, A.-C. (2019). Usine du futur et transformations du travail. L’apport d’une conduite de projet centrée activité. Cadres, n°482. https://hal.archives-ouvertes.fr/hal-03180325/document
- Barcellini, F., Van Belleghem, L., & Daniellou, F. (2013). Les projets de conception comme opportunité de développement des activités. In P. Falzon (Éd.), Ergonomie constructive (p. 191‑206). Presses Universitaires de France (PUF). https://doi.org/10.3917/puf.falzo.2013.01.0191
- Bourgeois, F., & Hubault, F. (2005). Prévenir les TMS : De la biomécanique à la revalorisation du travail, l’analyse du geste dans toutes ses dimensions. Activites, 02(1). https://doi.org/10.4000/activites.1561
- Caroly, S. (2010). Activité collective et réélaboration des règles : Des enjeux pour la santé au travail. [Habilitation à diriger des recherches (HDR), Université Victor Segalen – Bordeaux II]. https://halshs.archives-ouvertes.fr/tel-00464801/document
- Caroly, S., Simonet, P., & Vézina, N. (2015). Marges de manœuvre et pouvoir d’agir dans la prévention des TMS et des RPS. Le Travail Humain, 78(1). https://bit.ly/3JM1fgL
- Daniellou, F. (1992). Le statut de la pratique et des connaissances dans l’intervention ergonomique de conception. [Thèse d’Habilitation à Diriger des Recherches]. Université Victor Segalen Bordeaux 2 – Laboratoire d’ergonomie des systèmes complexes.
- Falzon, P. (2008). Enabling safety: Issues in design and continuous design. Cognition, Technology & Work, 10(1), 7‑14. https://doi.org/10.1007/s10111-007-0072-1
- Falzon, P. (2013). Ergonomie constructive. Presses Universitaires de France (PUF). https://doi.org/10.3917/puf.falzo.2013.01
- Folcher, V. (2015). Conception pour et dans l’usage, la maitrise d’usage en conduite de projet. Revue des Interactions Humaines Médiatisées, 16(1), 39‑60. https://bit.ly/3s8LTw8
- Gnambs, T., & Appel, M. (2019). Are robots becoming unpopular? Changes in attitudes towards autonomous robotic systems in Europe. Computers in Human Behavior, 93, 53‑61. https://doi.org/10.1016/j.chb.2018.11.045
- INRS. (2016). Modes et méthodes de production en France en 2040 : Quelles conséquences pour la santé et la sécurité au travail ? (Prospectives en santé et sécurité au travail). INRS. https://bit.ly/38AQQqV
- INRS. (2020a). 10 questions sur les robots collaboratifs (ED 6386). INRS. https://bit.ly/3J4ruhm
- INRS. (2020b). Robots collaboratifs [Dossier thématique (PDF)]. INRS. https://bit.ly/3r2wWLB
- INRS. (2020c). Robots collaboratifs—Identifier les risques pour les prévenir [Infographie]. https://bit.ly/35zu2X9
- Jocelyn, S., Burlet-Vienney, D., Giraud, L., & Sghaier, A. (2017). Robotique collaborative. Evaluation des fonctions de sécurité et retour d’expérience des travailleurs, utilisateurs et intégrateurs au Québec (R-974 ; Rapports Scientifiques). IRSST Institut de recherche Robert-Sauvé en santé et en sécurité du travail. https://bit.ly/38noW1f
- Kleinpeter, É. (2015). Le Cobot, la coopération entre l’utilisateur et la machine. Multitudes, 58(1), 70‑75. Cairn.info. https://doi.org/10.3917/mult.058.0070
- Lafeuillade, A.-C., Buchmann, W., & Barcellini, F. (2018). Le travail au cœur de l’Industrie du Futur, l’introduction de la robotique collaborative dans les PME’s. 53ème Congrès International Société d’Ergonomie de Langue Française, Bordeaux. https://bit.ly/3NFaSAh
- Marsot, J., & Atain-Kouadio, J.-J. (2017). Conception des équipements de travail et prévention des TMS – Complémentarités et points d’ancrage des démarches. Perspectives interdisciplinaires sur le travail et la santé, 19‑2. https://doi.org/10.4000/pistes.4993
- Marsot, J., Blaise, J.-C., Claudon, L., Paty, B., Laine, P., & Duval, C. (2021). Industrie du Futur : Points de vigilance vis-à-vis de l’application des Principes Généraux de Prévention. Hygiène et Sécurité du Travail, 264, 115‑120. https://bit.ly/3Ef0I3Q
- Martin, C. (2012). Maîtrise d’ouvrage, maîtrise d’œuvre : Construire un vrai dialogue la contribution de l’ergonome à la conduite de projet architectural (2e éd. annotée). Octarès Editions.
- Millot, P., & Debernard, S. (2007). An attempt for conceptual framework for human-machine cooperation. IFAC Proceedings Volumes, 40(16), 347‑353. https://doi.org/10.3182/20070904-3-KR-2922.00061
- Moulières-Seban, T. (2017). Conception de systèmes cobotiques industriels : Approche cognitique : Application à la production pyrotechnique au sein d’Ariane Group. [Thèse de Doctorat en Ergonomie, Université de Bordeaux]. https://bit.ly/3uyJMSQ
- Moulières-Seban, T., Bitonneau, D., Thibault, J.-F., Salotti, M., & Claverie, B. (2016). La Cobotique : Un domaine pluridisciplinaire émergent utile à l’ergonome. Actes du 51ème congrès international de la SELF, 643‑654. https://bit.ly/3LOtqMK
- Paluch, S., Tuzovic, S., Holz, H. F., Kies, A., & Jörling, M. (2022). “My colleague is a robot” – exploring frontline employees’ willingness to work with collaborative service robots. Journal of Service Management, 33(2), 363‑388. https://doi.org/10.1108/JOSM-11-2020-0406
- Pollak, A., Paliga, M., Pulopulos, M. M., Kozusznik, B., & Kozusznik, M. W. (2020). Stress in manual and autonomous modes of collaboration with a cobot. Computers in Human Behavior, 112, 106469. https://doi.org/10.1016/j.chb.2020.106469
- Rossato, C., Pluchino, P., Cellini, N., Jacucci, G., Spagnolli, A., & Gamberini, L. (2021). Facing with Collaborative Robots: The Subjective Experience in Senior and Younger Workers. Cyberpsychology, Behavior, and Social Networking, 24(5), 349‑356. https://doi.org/10.1089/cyber.2020.0180
- Saint-Vincent, M., Vézina, N., Laberge, M., Gonella, M., Lévesque, J., Petitjean-Roget, T., Coulombe, T., Beauvais, A., Ouellet, S., Dubé, J., Lévesque, S., & Cole, D. (2010). L’intervention ergonomique participative pour prévenir les TMS : Ce qu’en dit la littérature francophone (R-667). IRSST. https://bit.ly/3rky4JP
- Schraft, R. D., Meyer, C., Parlitz, C., & Helms, E. (2005). PowerMate-A Safe and Intuitive Robot Assistant for Handling and Assembly Tasks. Proceedings of the 2005 IEEE International Conference on Robotics and Automation, 4074‑4079. https://doi.org/10.1109/ROBOT.2005.1570745
- Van Belleghem, L. (2018). La simulation de l’activité en conception ergonomique : Acquis et perspectives. Activites, 15(1). https://doi.org/10.4000/activites.3129
- Van Belleghem, L., Bahuaud, B., & Martin, S. (2008). L’architecte au service de l’ergonome au service de l’architecte. In P. Negroni & Y. Haradji (Éds.), Actes du 43ème congrès de la SELF. Editions ANACT Lyon. https://bit.ly/3aM9TwA
- Vézina, N. (2021). La pratique de l’ergonomie face aux TMS : ouverture à l’interdisciplinarité [Page Web]. UQAM | L’invisible qui fait mal. https://bit.ly/3Kiq8S0
- Volkoff, S., & Gaudart, C. (2015). Conditions de travail et « soutenabilité » : Des connaissances à l’action (Rapport de Recherche No 91). Centre d’études de l’emploi (CEE). https://bit.ly/38Pr425
- Zouinar, M. (2018). Automatisation, Intelligence Artificielle et Robotique : Quelles ruptures et quelles continuités pour l’activité humaine ? Journée @ctivités : IA, Robotique, Automatisation : quelles évolutions pour l’activité humaine ?, CNAM, Paris. https://bit.ly/35cJQPp
Contenus associés
- Repères | Démarche ergonomique & robots collaboratifs – Partie 1 : Contexte
- Repères | Démarche ergonomique & Robots collaboratifs – Partie 2 : conduite de projet centrée sur l’activité
- Repères | Sécurité des robots collaboratifs : conception et déploiement.